

The SatNav Toolbox provides functions that allow the user to compute the so-called ‘parity vector’ which is a test statistic used for fault detection and isolation (FDI). In the world of satellite navigation, FDI is also known as receiver autonomous integrity monitoring (RAIM).
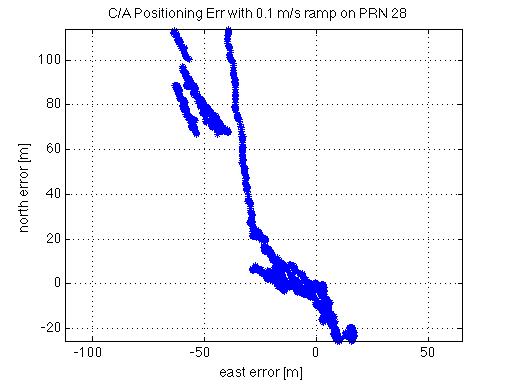
In the example shown here, data was obtained from a continuously operation reference station (CORS) located in Athens, Ohio. Stand-alone (i.e., non-differential) position solutions were calculated using the C/A-code pseudorange measurements. In order to demonstrate the effect of an abnormal error, a slow ‘ramp’ error of 0.1 meter/second was generated and added to the pseudorange measurements of satellite PRN 28 (which was visible for the entire duration of the data collection).
Over the course of four hours, the induced error has a significant impact on the horizontal position error:
Examination of the individual error components shows the errors to vary significantly as other satellites come into or drop out of the solution:
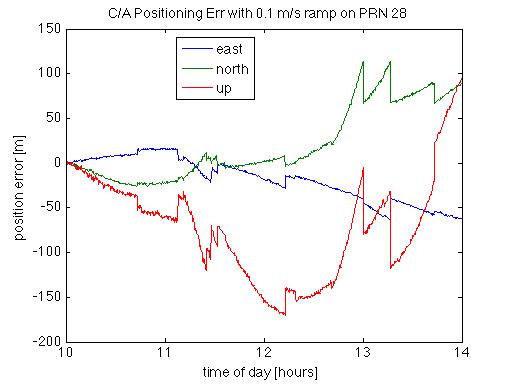
The sudden jumps in the error components are a clearly indication of a constellation change (or, more precisely, a change in the number of satellites used/available in the position solution). If the satellite geometry is favorable, however, the parity vector magnitude can be used as an indication of the position error:
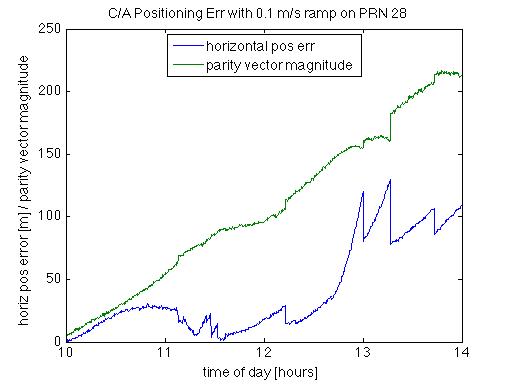
Note that the parity magnitude can be computed in real time by the receiver whereas the actual error is generally unknown. It is known in this example only because the data was obtained from a reference receiver at a surveyed antenna location.