

The SatNav Toolbox provides functions and example programs that allow the user to perform position determination based on real pseudorange measurements and broadcast ephemeris data, in RINEX format.
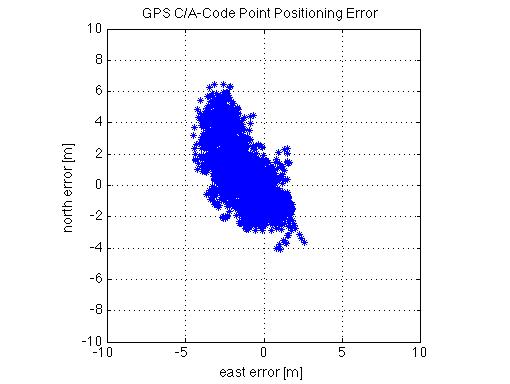
In the example shown here, data was obtained from a continuously operation reference station (CORS) located in Athens, Ohio. Stand-alone (i.e., non-differential) position solutions were calculated using the C/A-code pseudorange measurements. With no tropospheric or ionospheric corrections applied, the horizontal position error is still within +/- 5 meters:
The following plot shows the separate position error components:
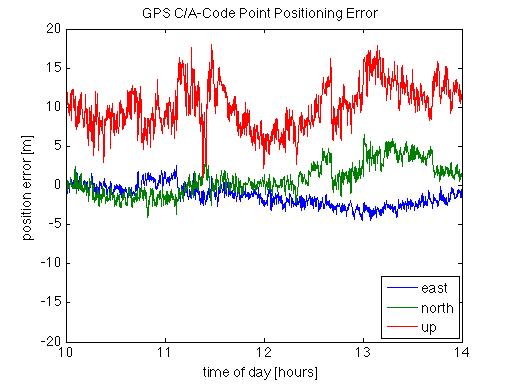
As would be expected, the vertical error is significantly larger than the horizontal error components.
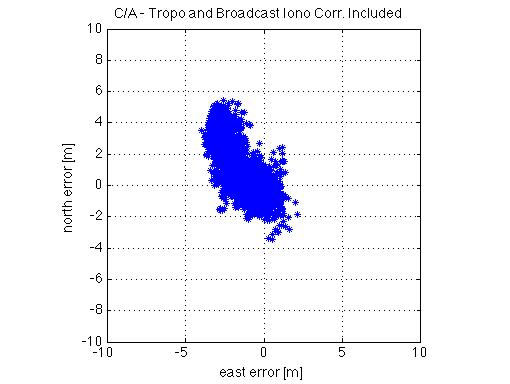
If a simple (i.e., elevation-angle dependent only) tropospheric correction model is applied along with the broadcast ionospheric correction model, the horizontal position error does not seem to improve significantly:
However, examination of the individual components clearly reveals a significant reduction in vertical error:
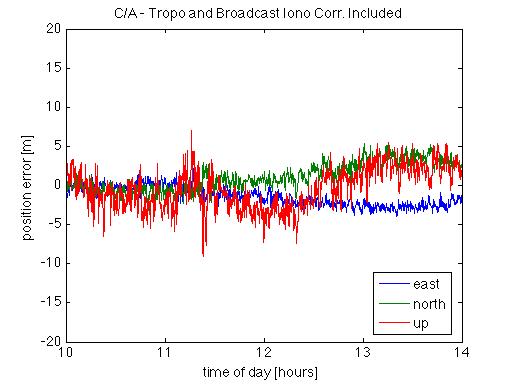
Since the tropospheric and ionospheric errors are composed primarily of biases, the impact is focused on the receiver clock solution and the vertical position error.