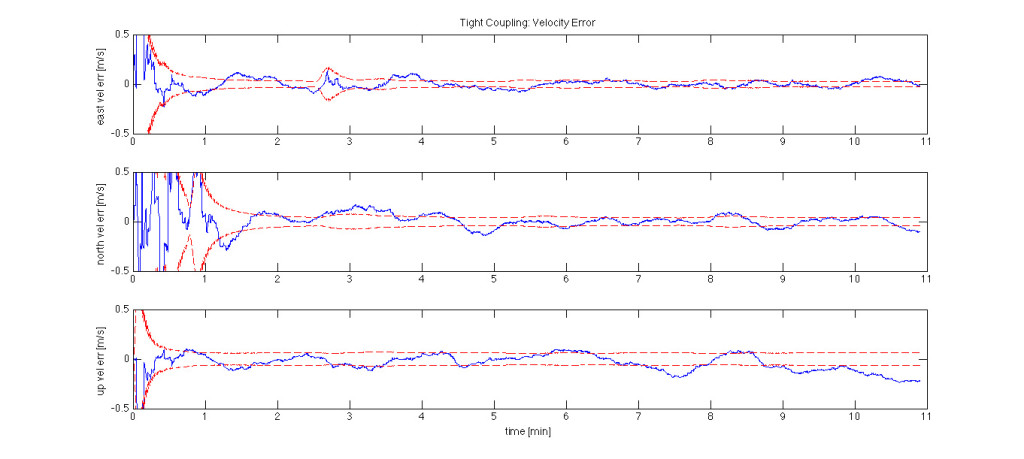
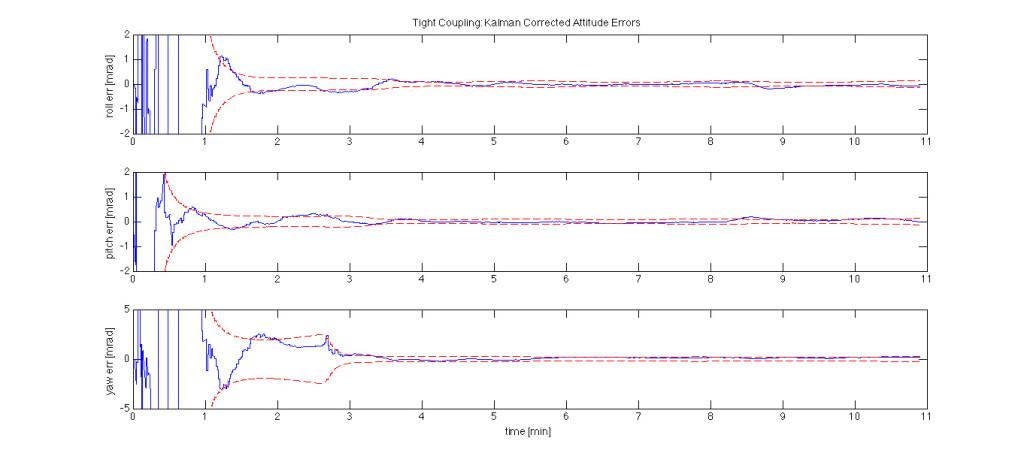
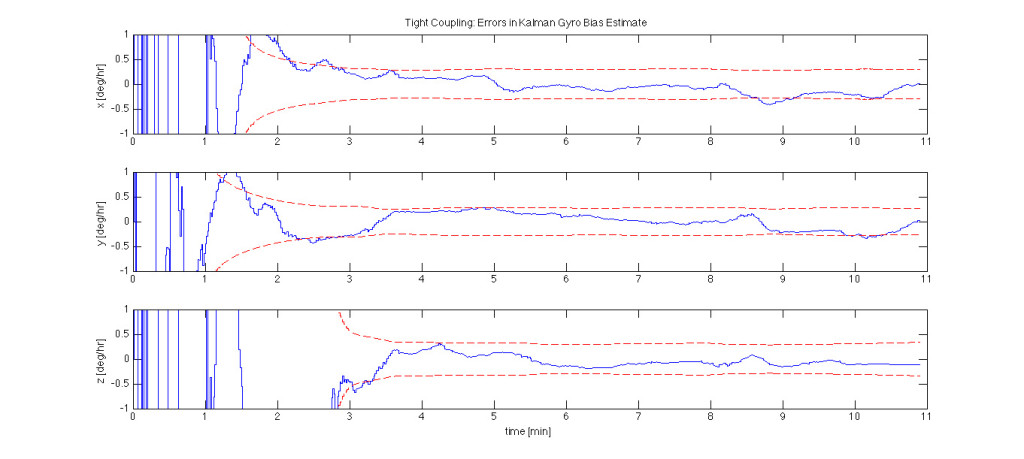
The NSI&KF provides functions and example programs supporting tightly-coupled GNSS/INS integration. A 29-state filter example models the nine inertial error states (position, velocity, attitude), 3 accel bias states, 3 gyro bias states and 2 GNSS clock states and 12 pseudorange bias states. The short (i.e., 11 minute) trajectory profile was used. A nav-grade INS was modeled and the GPS measurements were corrupted by noise, ionospheric delay, tropospheric delay and multipath. A random walk model was used to simulate receiver clock drift.
In each plot, the actual estimation error is plotted in blue and the one-sigma estimation error bounds (provided by the Kalman filter estimation error covariance matrix) are plotted in red. The effects of initial convergence are clearly observed as are the effects of the vehicle turns.