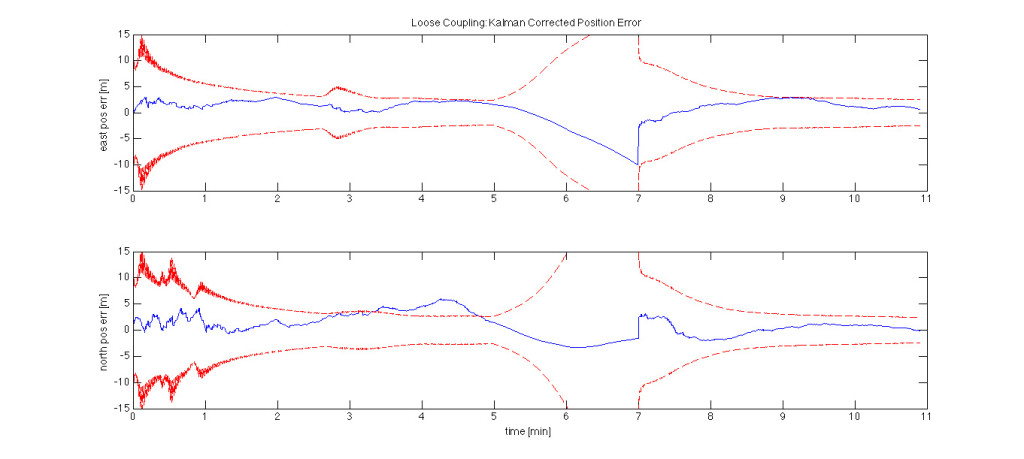
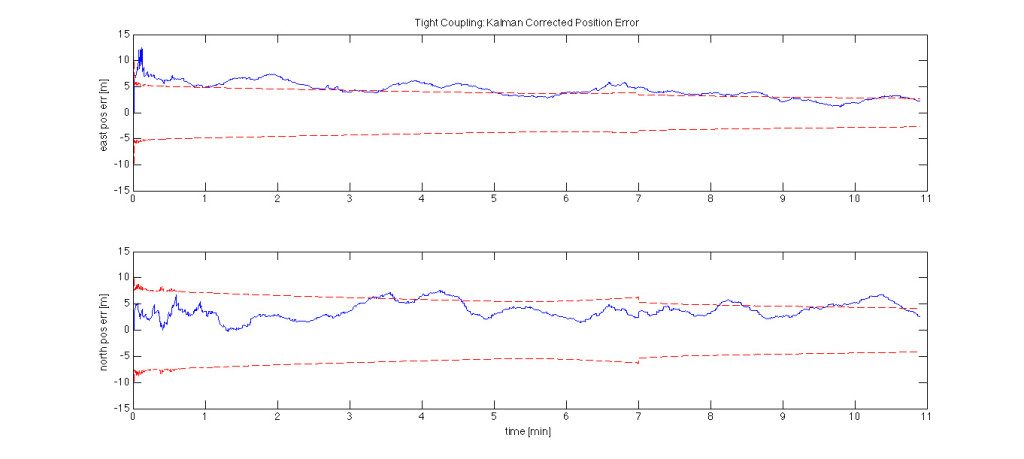
The graceful degradation provided by a tightly-coupled integration may be observed by artificially reducing the number of visible satellites in the simulation. Here we take the same short (i.e., 11 minute) trajectory profile used in the loosely-coupled and tight-coupled examples but from t = 5 min up to t = 7 min we reduce the number of visible satellites to just 3. There is thus no GNSS position solution to aid the loosely-coupled integration whereas there are still three pseudorange measurements feeding the tightly-coupled integration. As long as the receiver’s clock instability is not too great, the results are dramatic: