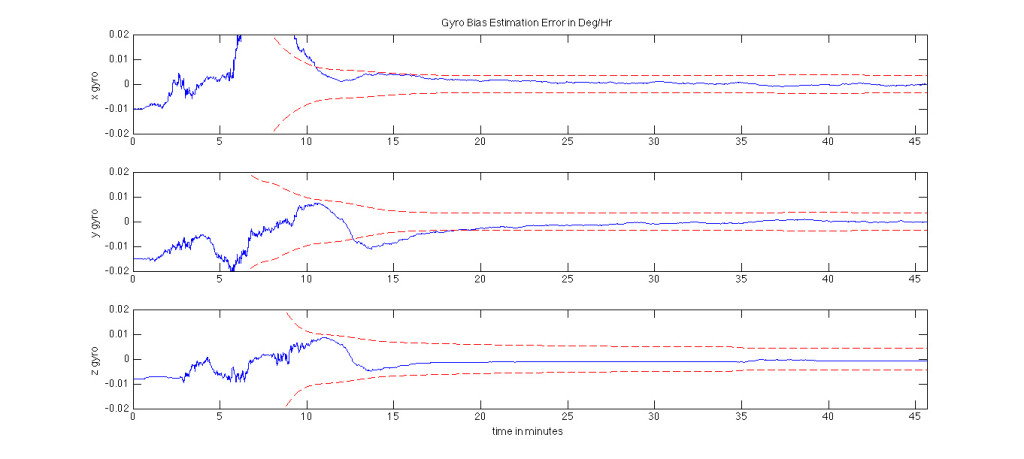
The inertial error model utilized by the integration filter has a linearity assumption built into it. So long as the inertial errors are sufficiently small, the assumption holds. As a result in actual practice, the Kalman filter corrections must be fed back periodically to keep the errors small.
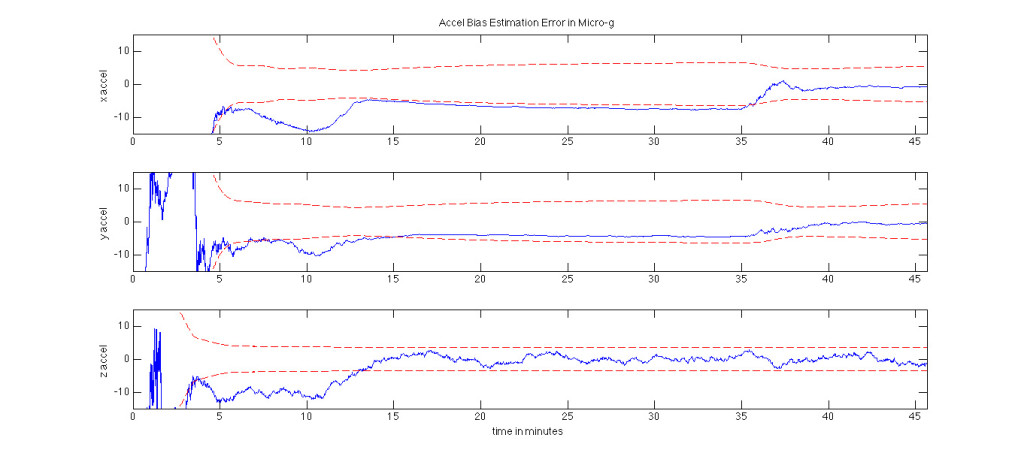
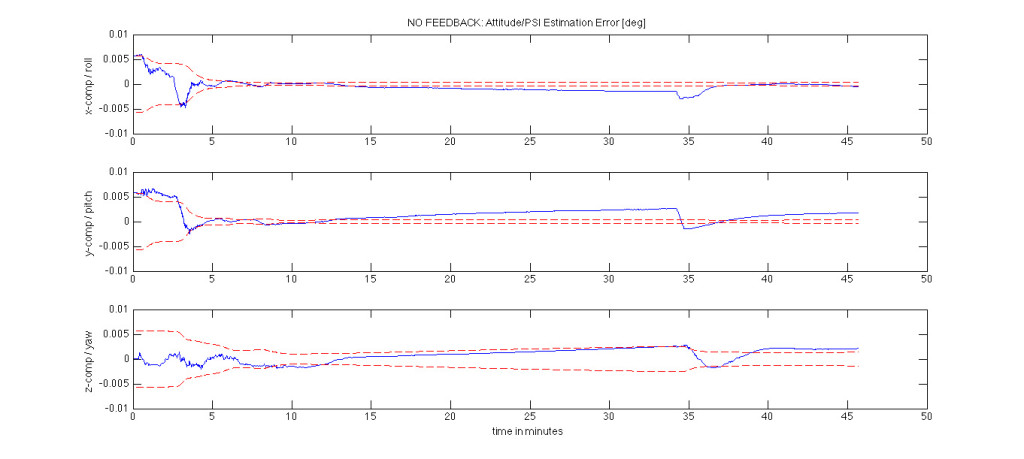
To illustrate this, a loosely-coupled integration was performed utilizing a long (i.e., 45 minute) trajectory. With no feedback, the vertical solution eventually diverges:
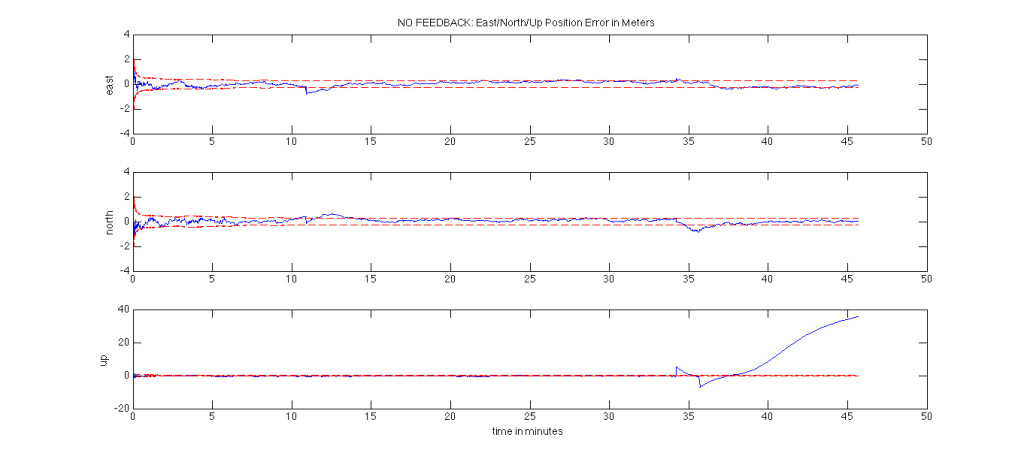
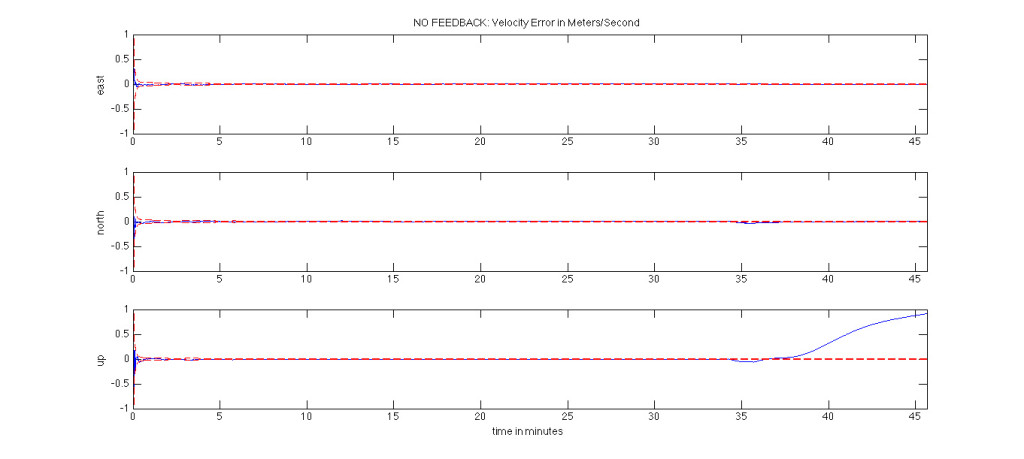
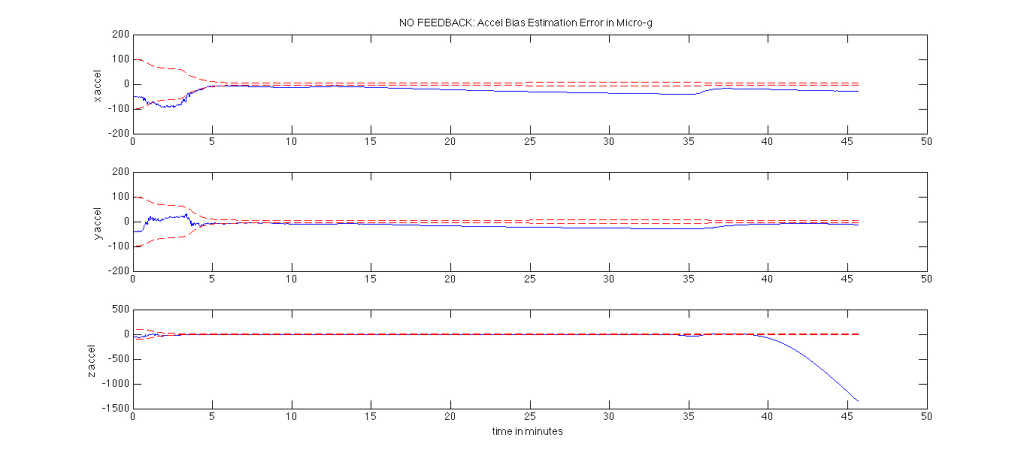
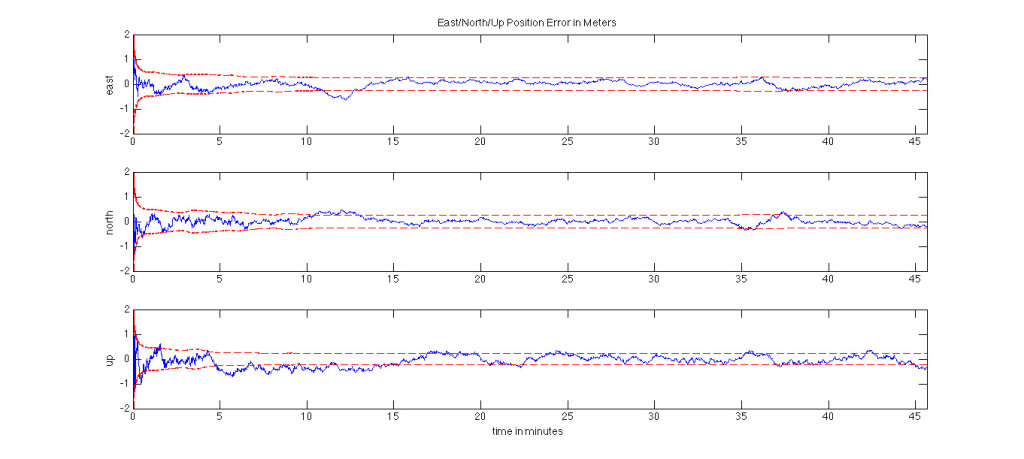
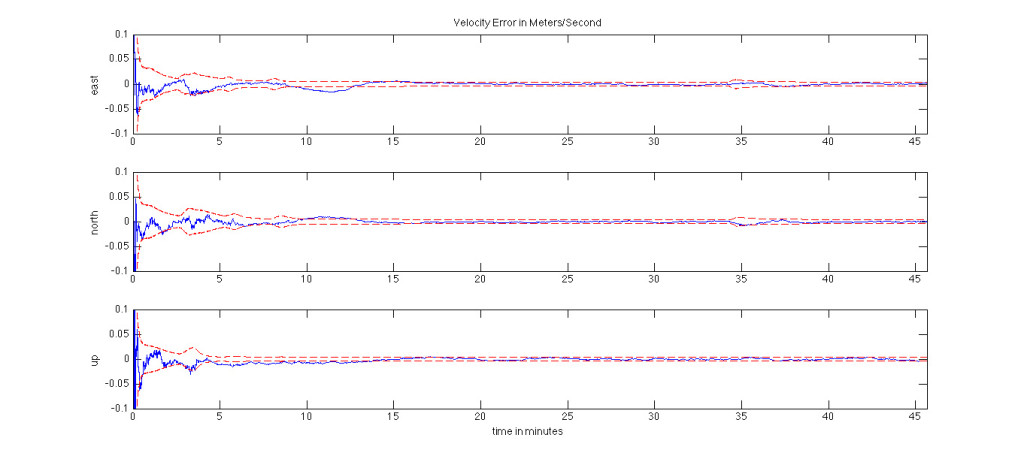
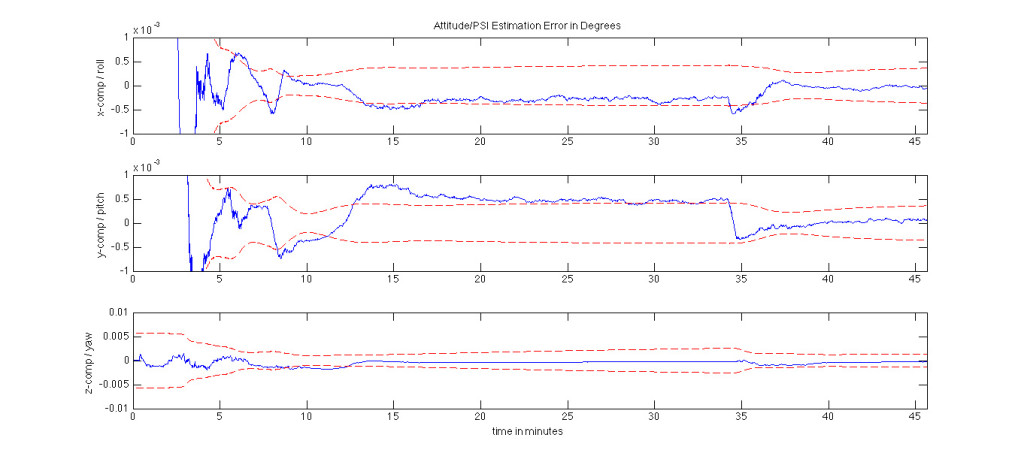
The divergence problem can be solved by feeding back the error estimates once the filter has converged: