

The INS Toolbox provides the necessary functions to emulate a wide variety of inertial sensors from RLG’s and FOG’s down to MEMS sensors via user-defined sensors errors such as biases, scale factor error and noise.
A key feature is the F-16 six degree-of-freedom (6DOF) trajectory generator with simulated feedback control. This greatly enhances the fidelity of the simulated trajectories as well as that of the simulated inertial sensor outputs. The toolbox contains functions that allow the user to define a dynamic trajectory in a local-level coordinate frame and then perform a full INS simulation in the rotating earth frame.
The INS Toolbox is fully compatible with the GPSoft SatNav Toolbox and both are utilized in GPSoft’s Navigation System Integration & Kalman Filter Toolbox.
The links below provide examples:
- F-16 6DOF Flight Profile Generator Feedback Control
- Automobile Profile Generator
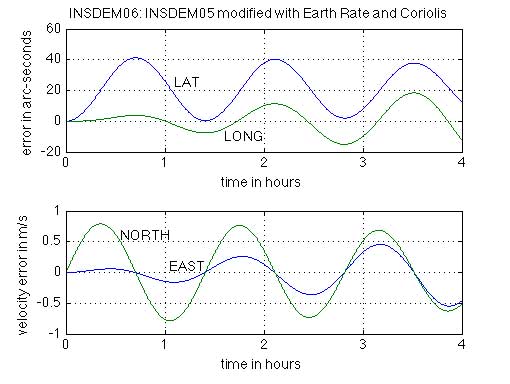
- Local Level INS Simulation
- Quaternion Updating
- Sensor Error Simulations
- Great Circle Path Generator
- Great Circle Path INS Simulation Sensor Errors
- Wander-Azimuth-Mechanizations
To Order the SatNav Toolbox 3.0:
Contact NavtechGPS
Telephone: 1-800-628-0885 or 703-256-8900
Fax: 703-256-8988
Click here to purchase this product.